I am trying to reproject 2D points to their original 3D coordinates, assuming I know the distance at which each point is. Following the OpenCV documentation, I managed to get it to work with zero-distortions. However, when there are distortions, the result is not correct.
So, the idea is to reverse the following:
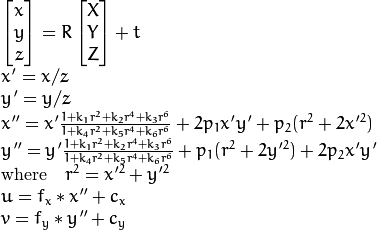
into the following:

By:
cv::undistortPoints
z to reverse the normalization.f_x and f_y to get back to the normalized camera coordinates (found empirically when testing)? In the code below, in step 2, if I don't subtract -- even the non-distorted result is off#include <iostream>
#include <opencv2/calib3d/calib3d.hpp>
#include <opencv2/core/core.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <vector>
std::vector<cv::Point2d> Project(const std::vector<cv::Point3d>& points,
const cv::Mat& intrinsic,
const cv::Mat& distortion) {
std::vector<cv::Point2d> result;
if (!points.empty()) {
cv::projectPoints(points, cv::Mat(3, 1, CV_64F, cvScalar(0.)),
cv::Mat(3, 1, CV_64F, cvScalar(0.)), intrinsic,
distortion, result);
}
return result;
}
std::vector<cv::Point3d> Unproject(const std::vector<cv::Point2d>& points,
const std::vector<double>& Z,
const cv::Mat& intrinsic,
const cv::Mat& distortion) {
double f_x = intrinsic.at<double>(0, 0);
double f_y = intrinsic.at<double>(1, 1);
double c_x = intrinsic.at<double>(0, 2);
double c_y = intrinsic.at<double>(1, 2);
// This was an error before:
// double c_x = intrinsic.at<double>(0, 3);
// double c_y = intrinsic.at<double>(1, 3);
// Step 1. Undistort
std::vector<cv::Point2d> points_undistorted;
assert(Z.size() == 1 || Z.size() == points.size());
if (!points.empty()) {
cv::undistortPoints(points, points_undistorted, intrinsic,
distortion, cv::noArray(), intrinsic);
}
// Step 2. Reproject
std::vector<cv::Point3d> result;
result.reserve(points.size());
for (size_t idx = 0; idx < points_undistorted.size(); ++idx) {
const double z = Z.size() == 1 ? Z[0] : Z[idx];
result.push_back(
cv::Point3d((points_undistorted[idx].x - c_x) / f_x * z,
(points_undistorted[idx].y - c_y) / f_y * z, z));
}
return result;
}
int main() {
const double f_x = 1000.0;
const double f_y = 1000.0;
const double c_x = 1000.0;
const double c_y = 1000.0;
const cv::Mat intrinsic =
(cv::Mat_<double>(3, 3) << f_x, 0.0, c_x, 0.0, f_y, c_y, 0.0, 0.0, 1.0);
const cv::Mat distortion =
// (cv::Mat_<double>(5, 1) << 0.0, 0.0, 0.0, 0.0); // This works!
(cv::Mat_<double>(5, 1) << -0.32, 1.24, 0.0013, 0.0013); // This doesn't!
// Single point test.
const cv::Point3d point_single(-10.0, 2.0, 12.0);
const cv::Point2d point_single_projected = Project({point_single}, intrinsic,
distortion)[0];
const cv::Point3d point_single_unprojected = Unproject({point_single_projected},
{point_single.z}, intrinsic, distortion)[0];
std::cout << "Expected Point: " << point_single.x;
std::cout << " " << point_single.y;
std::cout << " " << point_single.z << std::endl;
std::cout << "Computed Point: " << point_single_unprojected.x;
std::cout << " " << point_single_unprojected.y;
std::cout << " " << point_single_unprojected.z << std::endl;
}
import cv2
import numpy as np
def Project(points, intrinsic, distortion):
result = []
rvec = tvec = np.array([0.0, 0.0, 0.0])
if len(points) > 0:
result, _ = cv2.projectPoints(points, rvec, tvec,
intrinsic, distortion)
return np.squeeze(result, axis=1)
def Unproject(points, Z, intrinsic, distortion):
f_x = intrinsic[0, 0]
f_y = intrinsic[1, 1]
c_x = intrinsic[0, 2]
c_y = intrinsic[1, 2]
# This was an error before
# c_x = intrinsic[0, 3]
# c_y = intrinsic[1, 3]
# Step 1. Undistort.
points_undistorted = np.array([])
if len(points) > 0:
points_undistorted = cv2.undistortPoints(np.expand_dims(points, axis=1), intrinsic, distortion, P=intrinsic)
points_undistorted = np.squeeze(points_undistorted, axis=1)
# Step 2. Reproject.
result = []
for idx in range(points_undistorted.shape[0]):
z = Z[0] if len(Z) == 1 else Z[idx]
x = (points_undistorted[idx, 0] - c_x) / f_x * z
y = (points_undistorted[idx, 1] - c_y) / f_y * z
result.append([x, y, z])
return result
f_x = 1000.
f_y = 1000.
c_x = 1000.
c_y = 1000.
intrinsic = np.array([
[f_x, 0.0, c_x],
[0.0, f_y, c_y],
[0.0, 0.0, 1.0]
])
distortion = np.array([0.0, 0.0, 0.0, 0.0]) # This works!
distortion = np.array([-0.32, 1.24, 0.0013, 0.0013]) # This doesn't!
point_single = np.array([[-10.0, 2.0, 12.0],])
point_single_projected = Project(point_single, intrinsic, distortion)
Z = np.array([point[2] for point in point_single])
point_single_unprojected = Unproject(point_single_projected,
Z,
intrinsic, distortion)
print "Expected point:", point_single[0]
print "Computed point:", point_single_unprojected[0]
The results for zero-distortion (as mentioned) are correct:
Expected Point: -10 2 12
Computed Point: -10 2 12
But when the distortions are included, the result is off:
Expected Point: -10 2 12
Computed Point: -4.26634 0.848872 12
This is a camera to image projection -- I am assuming the 3D points are in the camera-frame coordinates.
OK, I figure out the subtraction of the f_x and f_y -- I was stupid enough to mess up the indexes. Updated the code to correct. The other question still holds.
To increase visibility, adding the Python codes, because it has the same error.
I found what the problem was -- The 3D point coordinates matter! I assumed that no matter what 3D coordinate points I choose, the reconstruction would take care of it. However, I noticed something strange: when using a range of 3D points, only a subset of those points were reconstructed correctly. After further investigation, I found out that only the images that are in the field of view of the camera would be properly reconstructed. The field-of-view is the function of the intrinsic parameters (and vice-versa).
For the above codes to work, try setting the parameters as follows (intrinsics are from my camera):
...
const double f_x = 2746.;
const double f_y = 2748.;
const double c_x = 991.;
const double c_y = 619.;
...
const cv::Point3d point_single(10.0, -2.0, 30.0);
...
Also, don't forget that in camera coordinates negative y coordinates is UP :)
There was a bug where I was trying to access the intrinsics using
...
double f_x = intrinsic.at<double>(0, 0);
double f_y = intrinsic.at<double>(1, 1);
double c_x = intrinsic.at<double>(0, 3);
double c_y = intrinsic.at<double>(1, 3);
...
But intrinsic was a 3x3 matrix.
Moral of the story Write unit tests!!!
If you love us? You can donate to us via Paypal or buy me a coffee so we can maintain and grow! Thank you!
Donate Us With
