I realize this might be more of a math problem.
To draw the lines for my rectangles I need to solve for their corners. I have a rectangle center at (x,y) With a defined Width and Height.
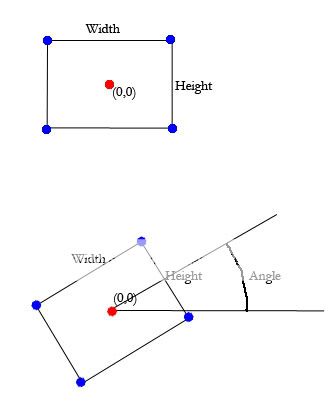
To find the blue points on a non rotated rectangle on top (angle = 0)
It is
UL = (x-Width/2),(y+height/2)UR = (x+Width/2),(y+height/2)LR = (x+Width/2),(y-height/2)LL = (x-Width/2),(y-height/2)
How do I find the points if the angle isn't 0?
Thanks in advance.
A rectangle is an example of a shape with rotation symmetry. A rectangle can be rotated about its center and it will look exactly the same and be in the same location. The only difference is the location of the named points. A rectangle has half-turn symmetry, and therefore is order 2.
New in SketchUp 2015, the Rotated Rectangle tool gives you more control over the way you can draw rectangles in SketchUp.
When the rectangle is revolved about line a, a rectangular prism is formed. The volume of the solid formed when the rectangle is rotated about line a is 72π cubic units.
First transform the centre point to 0,0
X' = X-x
Y' = Y-y
Then rotate for an angle of A
X'' = (X-x) * cos A - (Y-y) * sin A
Y'' = (Y-y) * cos A + (X-x) * sin A
Again transform back the centre point to x,y
X''' = (X-x) * cos A - (Y-y) * sin A + x
Y''' = (Y-y) * cos A + (X-x) * sin A + y
Hence compute for all 4 points of (X,Y) with following transformation
X''' = (X-x) * cos A - (Y-y) * sin A + x
Y''' = (Y-y) * cos A + (X-x) * sin A + y
where x, y are the centre points of rectangle and X,Y are the corner points You have n't defined correctly even the corner points when Angle is 0 as I have given in the comments.
After substituting you will get
UL = x + ( Width / 2 ) * cos A - ( Height / 2 ) * sin A , y + ( Height / 2 ) * cos A + ( Width / 2 ) * sin A
UR = x - ( Width / 2 ) * cos A - ( Height / 2 ) * sin A , y + ( Height / 2 ) * cos A - ( Width / 2 ) * sin A
BL = x + ( Width / 2 ) * cos A + ( Height / 2 ) * sin A , y - ( Height / 2 ) * cos A + ( Width / 2 ) * sin A
BR = x - ( Width / 2 ) * cos A + ( Height / 2 ) * sin A , y - ( Height / 2 ) * cos A - ( Width / 2 ) * sin A
I think this suits your solution.
If 'theta' is the anti-clockwise angle of rotation, then the rotation matrix is:
| cos(theta) -sin(theta) |
| sin(theta) cos(theta) |
i.e.
x' = x.cos(theta) - y.sin(theta)
y' = x.sin(theta) + y.cos(theta)
If the rotation point isn't at the origin, subtract the center of rotation from your original coordinates, perform the rotation as shown above, and then add the center of rotation back in again.
There's examples of other transformations at http://en.wikipedia.org/wiki/Transformation_matrix
Rotation matrix (this is becoming a FAQ)
See 2D Rotation.
q = initial angle, f = angle of rotation. x = r cos q y = r sin q x' = r cos ( q + f ) = r cos q cos f - r sin q sin f y' = r sin ( q + w ) = r sin q cos f + r cos q sin f hence: x' = x cos f - y sin f y' = y cos f + x sin f
One of the easiest ways to do this is to take the location of the point before rotation and then apply a coordinate transform. Since it's centred on (0,0), this is simply a case of using:
x' = x cos(theta) - y sin(theta)
y' = y cos(theta) + x sin(theta)
If you love us? You can donate to us via Paypal or buy me a coffee so we can maintain and grow! Thank you!
Donate Us With





